
Solutions technologiques de manipulation pour les pièces de production
La technologie de manipulation qui englobe l’ensemble du flux de matériaux de votre concept de production est l’un de nos domaines de compétence, au même titre que les machines d’assemblage innovantes. Nous disposons d’une équipe mondiale d’experts qui possèdent de nombreuses années d’expérience dans le développement de systèmes sur mesure avec une intégration logistique complète ; de la fourniture de composants individuels jusqu’à la manipulation de la pièce finie.
Nous mettons en place les processus les plus rentables pour une production efficace en combinant des composants standard et des solutions individuelles pour répondre aux exigences de nos clients. Outre les solutions technologiques de manipulation à grande vitesse destinées à l’industrie, au secteur automobile ou aux biens de consommation, nous proposons également des technologies répondant à des exigences spécifiques dans le secteur des technologies médicales. Actuellement, notre gamme de produits comprend des géométries de composants d’un volume de 8 mm³ à 0,25 m³ et d’un poids de 5 g à 25 kg.
En combinant différentes technologies, nous sommes en mesure de mettre en œuvre des systèmes d’alimentation et de décharge complets sur une large gamme de machines et de systèmes. Nous travaillons avec un stock de pièces minimal (one-piece flow), nous assurons une synchronisation optimale des processus et nous séparons la création de valeur de la logistique pour une conception allégée.
Notre savoir-faire en matière de solutions technologiques modernes de manipulation


Points forts technologiques de nos développements en matière de technologie de manipulation et de systèmes d’alimentation
Concepts de changement d’outillage et de configuration rapides
L’utilisation constante de systèmes de changement d’outillage rapide ou le montage sans outil de dispositifs d’alimentation et de manipulation permet à nos clients de répondre de manière flexible aux exigences de production. Une seule machine peut gérer plusieurs types de produits et peut être adaptée aux futurs produits sans effort considérable.
Impression 3D de bobines, supports de capteur, etc.
La construction de systèmes de manipulation directement pour l’impression 3D ouvre une large gamme d’options de conception en termes de forme et de géométrie des composants, tout en réduisant les coûts et le poids des matériaux. Les composants sont également faciles à reproduire et rapides à remplacer.
Utiliser des exemples pour nos solutions de manipulation
Alimentation et décharge pour les systèmes d’usinage
Notre concept d’alimentation et de décharge sur les rectifieuses pour les bagues intérieures et extérieures des rotules lisses est conçu pour s’adapter à une large gamme de types. Avec une plage de diamètres de 10 à 105 mm et une hauteur de 6 à 40 mm, la conception peut également être facilement ajustée pour d’autres produits. Le rendement est d’environ 1 300 bagues extérieures ou intérieures par minute.
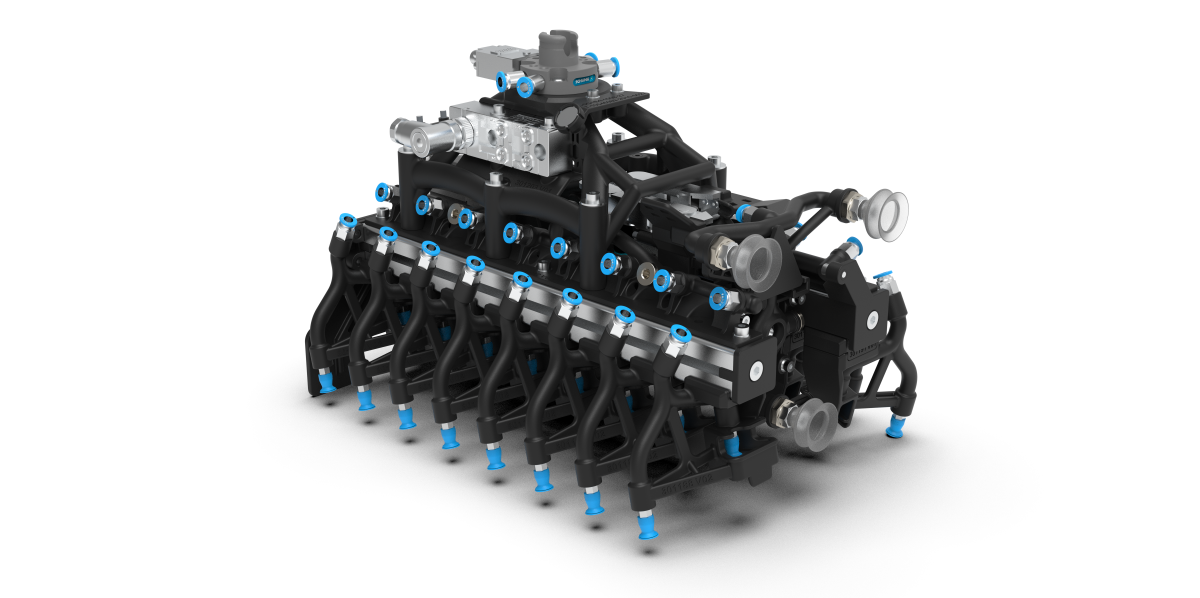
Opérations automatisées de prélèvement et de mise en place
Les robots tripodes sont utilisés lorsque les exigences en matière de vitesse ou de précision de placement sont élevées ou lorsqu’ils sont utilisés en combinaison avec des opérations de rotation pendant l’opération de transfert. Ils sont utilisés en particulier dans les systèmes d’assemblage, de test et d’emballage et dans une chaîne de ces systèmes. Nos spécialistes peuvent mettre en œuvre différents types de robots habituels dans ces systèmes. Dans l’équipement périphérique utilisé pour isoler les éléments de batterie, sept de ces applications effectuent environ 560 opérations de transfert par minute.

L’automatisation par la robotique

En intégrant des robots industriels ou des systèmes robotiques collaboratifs, nous concevons des applications sur mesure pour :
- manipuler des charges lourdes
- fournir une assistance ergonomique dans les processus manuels
- optimiser le flux de matériaux
- automatiser la production.
L’usinage, l’assemblage et d’autres processus de production sont pris en compte lors de l’analyse de l’organisation globale de la production et constituent la base de la conception de la technologie de manipulation. Nous utilisons par exemple des systèmes de préhension innovants, qui font appel à la technologie du vide et à l’impression 3D, ou des méthodes modernes de traitement de l’image pour le pick and place et le bin-picking.